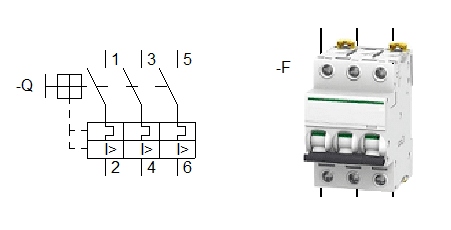
Relé Térmico (Elemento de protección)
El relé térmico es el tercer componente
de un circuito de fuerza o potencia y se trata de un dispositivo
electromecánico, diseñado para proteger a los motores eléctricos. El mismo
procura dar durabilidad a los motores industriales, cuidando a estos últimos de
sobrecargas o calentamientos.
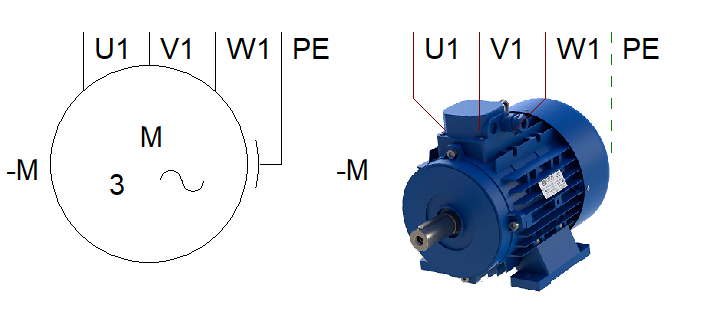
Motor Eléctrico (CARGA)
El motor eléctrico es la parte
operacional y a la que le sacamos provecho, este es el cuarto elemento de un
circuito de fuerza o potencia y es donde se convierte esa energía eléctrica en
energía mecánica o movimiento que luego aprovechamos. Este puede ser tanto
monofásico como trifásico, pero el fundamento en su control es el mismo.
B. Diagrama de Control o MandoEste básicamente es el que permite
controlar o accionar de una manera segura para el operador una maquina por
medio de un interruptor automático o contactor con bajas corrientes para
manejar corriente más altas. Es decir este activando la o las bobinas de un
conjunto de contactores permite cerrar o abrir contactos de fuerza. Disyuntor (Elemento de protección
termomagnética)
Al igual que en el circuito de fuerza en
el circuito de mando o control se utilizan elementos de protección como lo es
el disyuntor, con la diferencia que aquí utilizamos uno monofásico, porque por
lo general solo vamos a utilizarlo para manipular cargas tales como la bobina
de un contactor, alguna luz piloto o alarma.
Pulsadores (Elemento de control)
Los pulsadores, interruptores y todo
elemento de interacción hombre-maquina por medio del circuito de control nos
permiten controlar el circuito de fuerza y por ende la carga.
Adicionales
En el circuito de control también
tenemos unos elementos que son de suma importancia pero que realmente no
intervienen de forma alguna con el funcionamiento del equipo y estas son las luces piloto estas están
ahí para brindar control visual de que se está llevando a cabo una función
eléctrica en una ubicación local o remota.
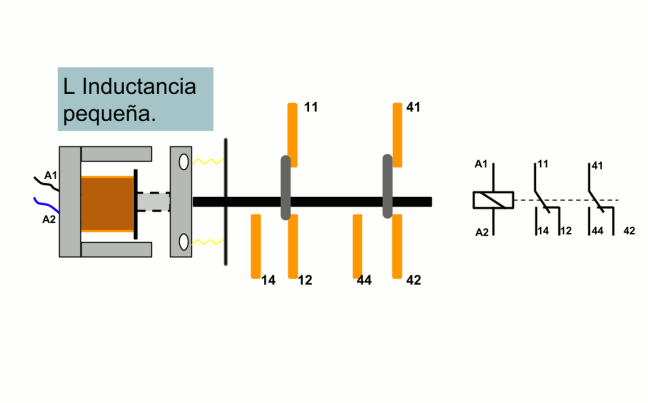
Los contactos de fuerza son los contactos principales del contactor y son los que energizan directamente a la máquina, siendo capaces de manejar corrientes altas, mientras que los contactos auxiliares generalmente son usados para realizar enclavamientos y para manejar pequeñas cargas, ejemplo una luz piloto. Para más información (Click aquí)
VIDEO SOBRE DIAGRAMA DEL
CIRCUITO DE CONTROL Y FUERZA
Aquí te dejamos un material de apoyo
sobre lo que ya hemos visto para que puedas ver de una forma más gráfica la
diferencia que hay entre un circuito de mando o control y uno de fuerza.
2. CADe_SIMU Ver. 4.0. NOVEDADES CADe_SIMU es
el referente en simulación de circuitos eléctricos para aplicaciones
industriales, sobre todo en el ámbito educativo debido a su gratuidad y
simplicidad. Lleva años entre nosotros y ya es todo un clásico que no necesita
mayores presentaciones. Hace unas pocas semanas se liberó una nueva versión, la
4.0, que llega cargada de novedades que analizaremos en este artículo.
Componentes en 2 y 3 dimensiones
Una de las
novedades mas notables de esta nueva versión de CADe_SIMU está relacionada con
la visualización de los componentes. Ahora, además de la forma esquemática
convencional a la que estábamos acostumbrados, podremos también usar símbolos
pictóricos o imágenes, tanto en vista de dos dimensiones como tridimensional.
No todos los elementos tienen esta posibilidad, sólo algunos (los mas comunes)
por ahora. Para poder insertar estos símbolos debemos seleccionar alguna de las dos opciones (2D o 3D) en la barra de herramientas de elementos:
Botones de símbolos 2D y 3D En cualquiera de los dos casos accedemos a los símbolos de veinte componentes, representados con ligeras variaciones.
Algunos
símbolos pictóricos en 2D y 3D, en distintos tamaños Una vez
dibujados, estos componentes pueden verse en notación simbólica, en vista 2D,
3D o la vista original empleando los siguientes botones de control: Opciones de vista de elementos pictóricos Nuevos
componentes Esta versión
de CADe_SIMU agrega algunos componentes nuevos a los ya existentes:
Enclavamiento
mecánico de contactos Es un dispositivo que permite vincular mecánicamente dos contactores, de manera que si uno esta cerrado, impide que se cierre también el otro. Esto es particularmente útil, por ejemplo en un circuito de inversión de giro, donde se debe evitar que los dos contactores cierren simultáneamente, produciendo un cortocircuito.
Enclavamiento
mecánico
Circuito sin enclavamiento mecánico
Circuito con
enclavamiento mecánico Motores paso
a paso Se agregan
como componentes el motor paso a paso unipolar y bipolar: Motores paso
a paso Controladores
de motores paso a paso Para
controlar los motores PAP se incluyen también nuevos controladores en la barra
de herramientas de potencia. Controladores
para motores PAP Termostatos Dentro de la
barra de herramientas de sensores, se agregan dos versiones de termostato,
con contactos normal abierto y normal cerrado. Termostatos Protectores
contra sobretensiones permanentes En la barra
de herramientas de relés electrónicos podemos encontrar como novedad el
agregado de dos protectores contra sobretensiones, uno monofásico y el otro
trifásico. Protectores
contra sobretensiones Relé con
contacto conmutado En la misma
barra, también tenemos a disposición dos tipos de relés de contactos
conmutados, uno de tipo SPST y el otro SPDT Relé de
contacto conmutado Temporizador
pulso conexión Este nuevo
temporizador, dentro la barra de herramientas de lógica, activa su
salida al detectar un pulso en su entrada, manteniendo la misma el tiempo que
esté configurado. Temporizador
pulso conexión Contadores
de 4 bits También
dentro de la barra de herramientas de lógica, en esta versión se añaden cuatro
contadores de 4 bits con distintas funciones. Contadores Decodificador
a 7 segmentos Siguiendo en
la misma barra de herramientas podemos encontrar un decodificador BCD a 7
segmentos. Decodificador
a 7 segmentos Entrada
“first scan” Dentro de la
barra de herramientas ladder, se agrega el componente “first scan”, una
entrada especial que se pone en estado ON sólo la primera vez que funciona el
programa, luego de lo cual se pone en estado OFF. Este tipo de entradas se
utilizan cuando hace falta realizar alguna inicialización cuando el programa
arranca. Entrada
“First scan” Nuevos PLCs
y módulos de ampliación En el
apartado de PLCs, en la barra de herramientas entrada/salida, vamos a
encontrar varias novedades. Se agregó el módulo de ampliación de E/S digitales
del Logo y del S7-1200. También se agrega el PLC S7-1500, el módulo de
ampliación y los módulos descentralizados ET 200. PLCs y
módulos de ampliación Arduino UNO CADe_SIMU
incluye ahora un Arduino UNO que podemos incluir en nuestros circuitos y
simulaciones, también dentro de la barra de herramientas entrada/salida Arduino UNO Conductores
de distintos espesores Finalmente,
esta versión de CADe_SIMU agrega la posibilidad de dibujar conductores de
cuatro espesores diferentes. Conductores
de distinto espesor
3. SIMULACIÓN CON PC_SIMU y
CADe_SIMU El software
CADe_SIMU es un clásico dentro de los programas dedicados al diseño y
simulación de circuitos eléctricos. Sin las pretensiones de otros paquetes mas
sofisticados, CADe_SIMU es una excelente opción para técnicos y estudiantes que
quieren dibujar y poner a prueba sus diseños. Siendo totalmente gratuito tiene
las funciones suficientes para diseñar y simular circuitos eléctricos o
electromecánicos simples o de mediana complejidad. En este artículo veremos
como utilizar CADE_SIMU junto a otro programa del mismo autor, PC_SIMU, lo que
nos permitirá ampliar sus capacidades de simulación, agregando escenarios “del
mundo real” que pueden interactuar con nuestro circuito.
PC_SIMU Este
programa fue originalmente diseñado para simular una planta industrial
controlada por un PLC, por lo que puede trabajar en conexión directa con uno de
ellos a través de un puerto serie o interactuando con el software simulador
S7-200. Incluso se puede cargar un pequeño programa en lenguaje STEP 5. Pero
además, a partir de la versión 2.0 de CADe_SIMU, también se puede emplear para
interactuar con los circuitos diseñados con él. PC_SIMU nos
permite dibujar una planta industrial incluyendo gran cantidad de elementos,
tanto eléctricos como mecánicos e incluso neumáticos, para lograr una
simulación bastante completa de procesos industriales sencillos, de gran valor
educativo. Algunos de los elementos que podemos incluir son: interruptores,
pulsadores, selectores, teclados, preselectores, finales de carrera, detectores
de proximidad, barreras infrarrojas, leds, displays, motores, cintas
transportadoras, cilindros, actuadores de giro y ventosas neumáticas, puertas
de garaje, depósitos o tolvas de líquidos y sólidos, electroválvulas, tuberías,
objetos, topes, ascensores, etc. No es la intención hacer un análisis exhaustivo de este programa, que está bastante documentado en la red.
La versión
que utilizaremos es la 1.0, que es la última disponible, aunque en su blog el
autor anuncia que pronto estará disponible la versión 2.0, con mas elementos
para construir la simulación. Interconexión con CADe_SIMU Vamos
entonces al propósito central de este artículo, explicar cómo podemos
interconectar los dos programas. Para ello utilizaremos un ejemplo: controlar
el portón de un garaje con dos pulsadores, uno que lo abre y otro que lo
cierra. Para ello empezamos dibujando el circuito de control en CADe_SIMU,
conectando los dos pulsadores (-S1 y -S2) a dos bobinas de contactores (-K1 y
-K2), como se ve en la siguiente imagen:
Circuito de control en CADe_SIMU Lo simulamos para asegurarnos de que todo funcione correctamente:
Ahora, en PC_Simu, construimos la simulación. En este caso agregamos el elemento “Puerta garaje”. Notarán que apenas hagan click en el ícono de “Puerta garaje” se nos muestran las opciones de ese objeto, a saber: Nombre, Entradas y Salidas relacionadas y Velocidad. El nombre podemos cambiarlo o dejarlo como está. Las Entradas y Salidas son las que originalmente se conectan al PLC para controlar el mecanismo de la puerta: una salida para abrir, una para cerrar y opcionalmente dos entradas de finales de carrera, para detectar que el portón se abrió y cerró en su totalidad.
Configuración del objeto “Puerta garaje” en PC_SIMU Para nuestro
ejemplo, vamos a desmarcar las entradas de los finales de carrera (porque
no los vamos a usar) y dejamos los valores por omisión. Sólo recordemos que la
apertura de la puerta se conecta a la salida Q0.0 y el cierre a la salida Q0.1.
Nos quedará algo así: La Puerta
garaje en PC_SIMU Ahora que
tenemos las dos partes, procedemos a conectarlas. Para ello debemos volver a
CADe_SIMU (hay que trabajar con los dos programas abiertos) y relacionamos las
bobinas de los contactores -K1 y -K2 con dos “salidas” que simularán a las que
acabamos de configurar en PC_SIMU. Para ello usamos un elemento nuevo en la
versión 2.0 denominado “Entrada/Salida” que contiene tres elementos: Una tabla
de entradas (I), una tabla de salidas (O) y un módulo LOGO. Entrada/Salida en el menú de CADe_SIMU Para
nuestros fines, por ahora, emplearemos sólo la tabla de salidas, ubicándola
cerca del circuito. Le hacemos doble click para editar sus propiedades y
asociamos -K1 con la salida Q0.0 y -K2 con la salida Q0.1. (hay que prestar
especial atención y no cometer errores con los nombres). Asociación de las contactoras con las salidas en
CADe_SIMU Una vez
hecho esto ya hay una asociación entre los contactores, las salidas y el
control de la puerta garaje (internamente esta asociación emplea el
portapapeles de Windows, así que mientras se haga la simulación no podremos
hacer operaciones de cortar y pegar).
Ya está todo
listo y podemos ver la simulación en funcionamiento: Como se puede ver, después de arrancar la simulación en los dos programas, la puerta de PC_SIMU se abre y se cierra al activar los contactores correspondientes de CADe_SIMU. Esta asociación puede hacerse en los dos sentidos, también podemos actuar en PC_SIMU y ver los resultados en CADE_SIMU. Para probar eso, agregaremos dos pulsadores al portón: uno Verde llamado “Pulsador Abre” asociado con la entrada I0.0 y otro de color Azul, llamado “Pulsador Cierra” y asociado a la entrada I0.1.
Agregamos dos pulsadores para
controlar la puerta
Luego, volvemos
a CADe_SIMU y agregamos una tabla de Entradas, asociando los pulsadores con
estas mismas entradas: Asociación de los pulsadores en
CADe_SIMU Hecho esto,
volvemos a probar la simulación:
|
|
|
|
|
|
|
|
|
|
|
ATRÁS
|
|
|
|
|
|
|
INICIO
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bienvenidos
al mundo de la Tecnología |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}